MuriGlo 1.6.0 Upgrade Instructions
Applicable Systems
This software upgrade is applicable to all SARRP systems.
Minimum Software Versions
| Software | Version |
|---|---|
| MuriPlan | 2.2.2 |
Instructions
Upgrade MuriGlo
- Download and launch the latest installer of MuriGlo software to install it to the computer.
- Select Upgrade if you are upgrading the computer. Select
Fullif setting up the computer for the first time.
Note: Selecting Full will over-write configuration files.
- The remaining options can be left as default.
Updating an NVIDIA GPU Driver
- Ascertain what GPU is installed on the computer that needs a driver upgrade. Below are two options to do this.
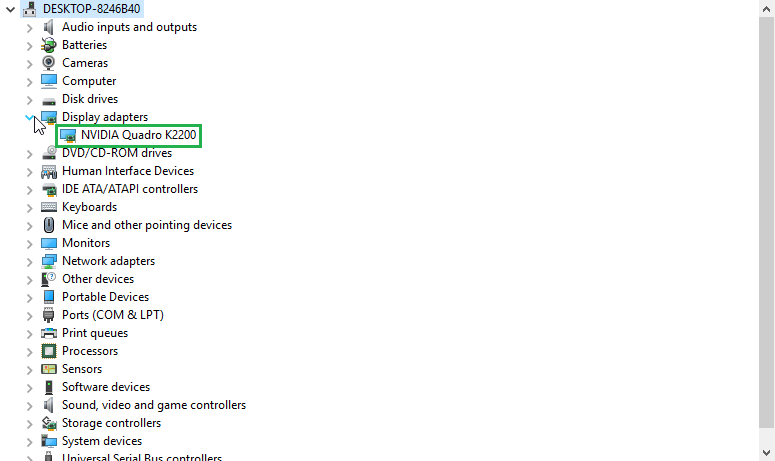
Use Device Manager
- To view the available GPUs on the system open
Device Managerand navigate toDisplay Adapters. - Note the name and model of the GPU device.
- To view the available GPUs on the system open
Use CUDA-Z
Cuda Z is a standalone tool that gives you useful information on the drivers and GPUs installed on your system. Note this tool only works for NVIDIA GPUs.
- Download CUDA-Z here.
- Lauch CUDA-Z to check the installed driver versions and what GPUs are available on the system.
Install the driver.
- Navigate to the NVIDIA Driver Download webpage.
- Select the
Product Type,Product SeriesandProductthat matches the GPU description seen in eitherDevice ManagerorCUDA-Z.- In the device manager screen shot above, the only availble GPU is an
NVIDIA Quadro K2200. This corresponds to aProduct TypeofQuadro, aProduct SeriesofQuadro Seriesand theProductis theQuadro K2200.
- In the device manager screen shot above, the only availble GPU is an
- Select the correct operating system for the computer you are working on (either Windows 7 or 10).
- Select the
Optimal Driver for Enterprise (ODE)option (do not select theQNF) option. - Click
Search. - The driver search tool should find the latest available driver for download. Download the driver and then launch the installer.
- Use the defaults to complete installing the driver. This may take a significant amount of time to complete.
Visual Studio Redistributable 2022
On some systems it may be necessary to install the Visual Studio 2022 Redistributable. If an error message pops up stating that the files msvcr143.dll and/or msvcp143.dll are missing then this step is necessary.
- Click the above link.
- Open the downloaded file and follow the onscreen prompts to complete the installation. A reboot may be necessary to fully complete the installation.
Set up for new hardware configuration
Starting with 1.6.0 of the MuriGlo software, a new hardware configuration system is used for the robotics. First, a muriglo_hardware_config.json file needs to be created and saved to C:\ProgramData\Xstrahl, Inc\MuriGlo. This file contains the hardware configuration settings for the MuriGlo software. The following is an example of the contents of the file:
{
"hardware-config": {
"cereal_class_version": 1,
"hardware_info": [
{
"cereal_class_version": 1,
"type": "RoboticController",
"role": "PrimaryRobotics",
"name": "Arcus Motor",
"model": "DMX 17-3",
"manufacturer": "Arcus",
"serial": "",
"required": true
}
]
}
}
What is important to note here is the model field. Change this to TITAN IMX 17-2 if using the newer version of the Arcus motor.
When first running the MuriGlo, the software will create a settings file for the particular motor model that is in the hardware configuration file if the settings file does not exist. Below are examples of these files for the support Arcus motor types.
Arcus DMX 17-3
{
"robot_config": {
"cereal_class_version": 1,
"steps_from_home": 9600.0,
"steps_for_ninety_degrees": 4796.0,
"degree_offset": 0.0,
"communication_type": "Usb"
}
}
Note: Change Usb to Ethernet if using the Ethernet version of the motor.
Titan IMX 17-2
The TITAN series motor requires two files: one for communication settings and one for motor settings:
Communication
{
"communication_settings": {
"cereal_class_version": 1,
"motor_index": 1,
"com_port": "COM4",
"baud_rate": 115200
}
}
Motor Settings
{
"robot_config": {
"cereal_class_version": 1,
"motor_index": 1,
"steps_from_home": 61720,
"steps_for_ninety_degrees": 38420,
"bed_sensor_index": "DigitalInput5",
"bed_sensor_active_high": false,
"homing_speed": 5,
"speed": 15,
"acceleration": 3000,
"position_kp": 50,
"velocity_kp": 100,
"velocity_ki": 40,
"current_kp": 70,
"kalman_velocity_noise": 5.0,
"kalman_current_noise": 0.5
}
}
Note: The “bed_sonsor_index” can be changed depending on which digital input the bed sensor is connected to. The default is DigitalInput5.
Upgrade MATLAB Runtime
- Download the R2017b (9.3) release of the MATLAB compiler runtime. This is a large file so it is recommended that you download it directly on the MuriGlo computer. Do not try to transfer via TeamViewer.
- Launch the installer and follow the onscreen prompts. Use all default options.